Experience
Launchpad.build, Robotics Software Engineer
12/2023 – Present
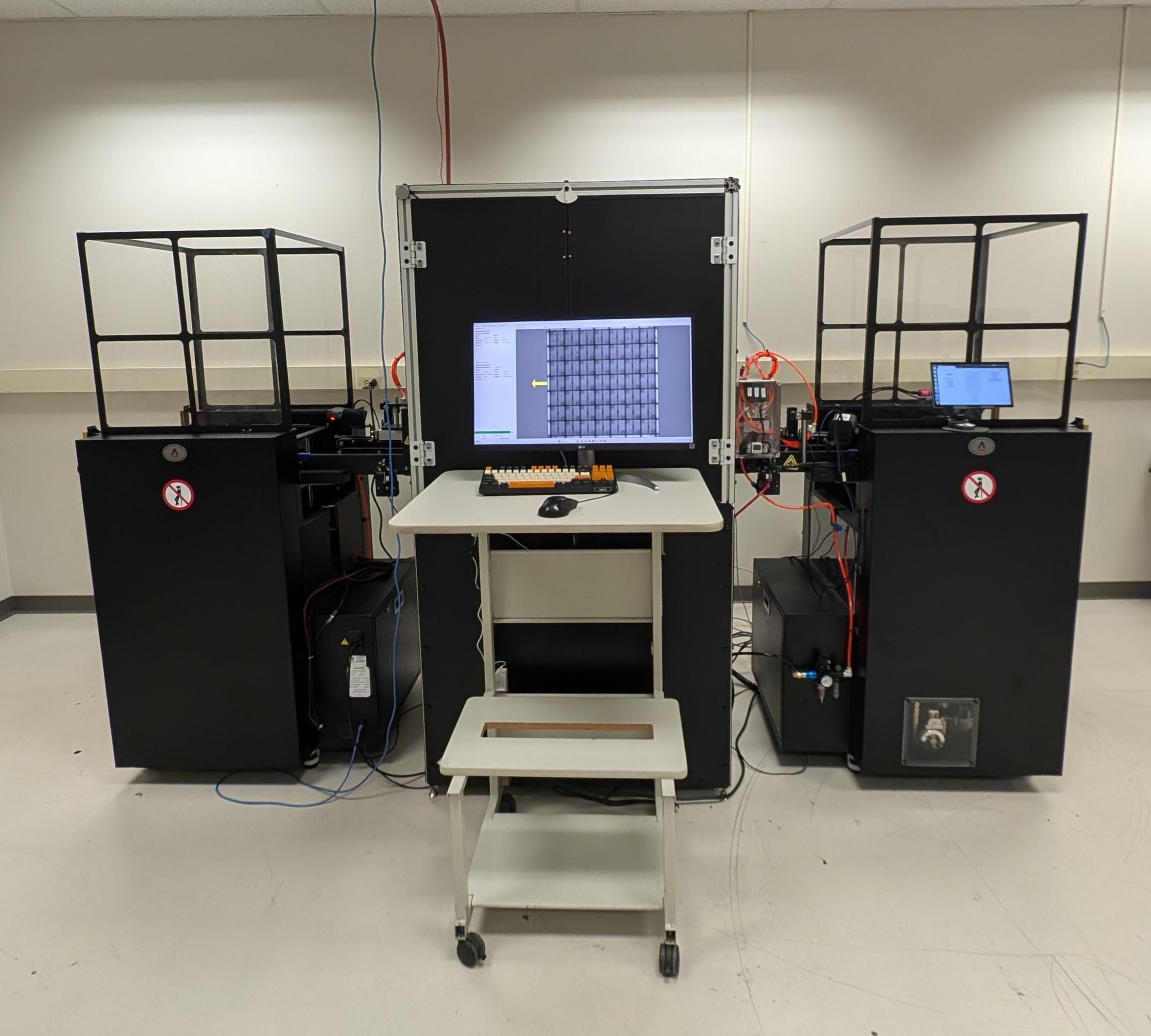
mPower Solar Wafer Feeder and Testing System for Satellite-Grade Solar Panels
- Architected and engineered the entire software stack for industrial silicon wafer feed and test machines, capable of processing 1,066 wafers per day, saving $100k per year in labor costs.
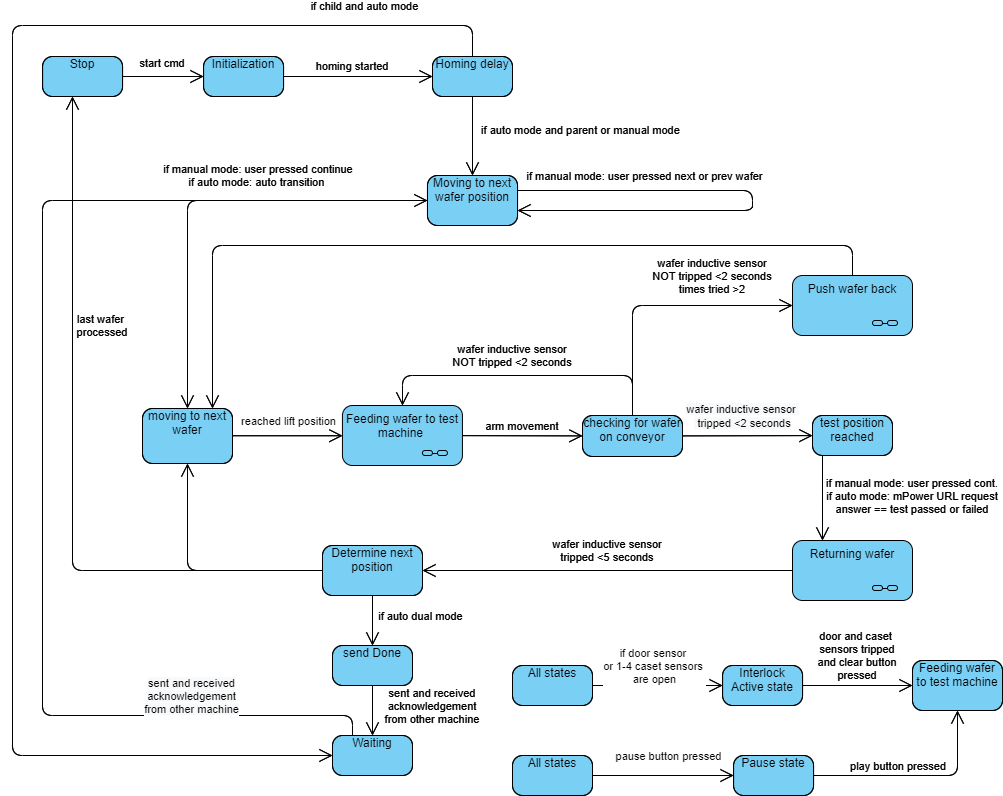
- Developed embedded state machines using Python and C++ on Nvidia Jetson Nanos, handling multiple inputs/outputs and Modbus 232 communication.
- Implemented a RESTful API using Flask, enabling real-time communication between machines and integration with external test equipment.
- Created a responsive front-end user interface using jQuery, HTML, and CSS for real-time system control and status updates.
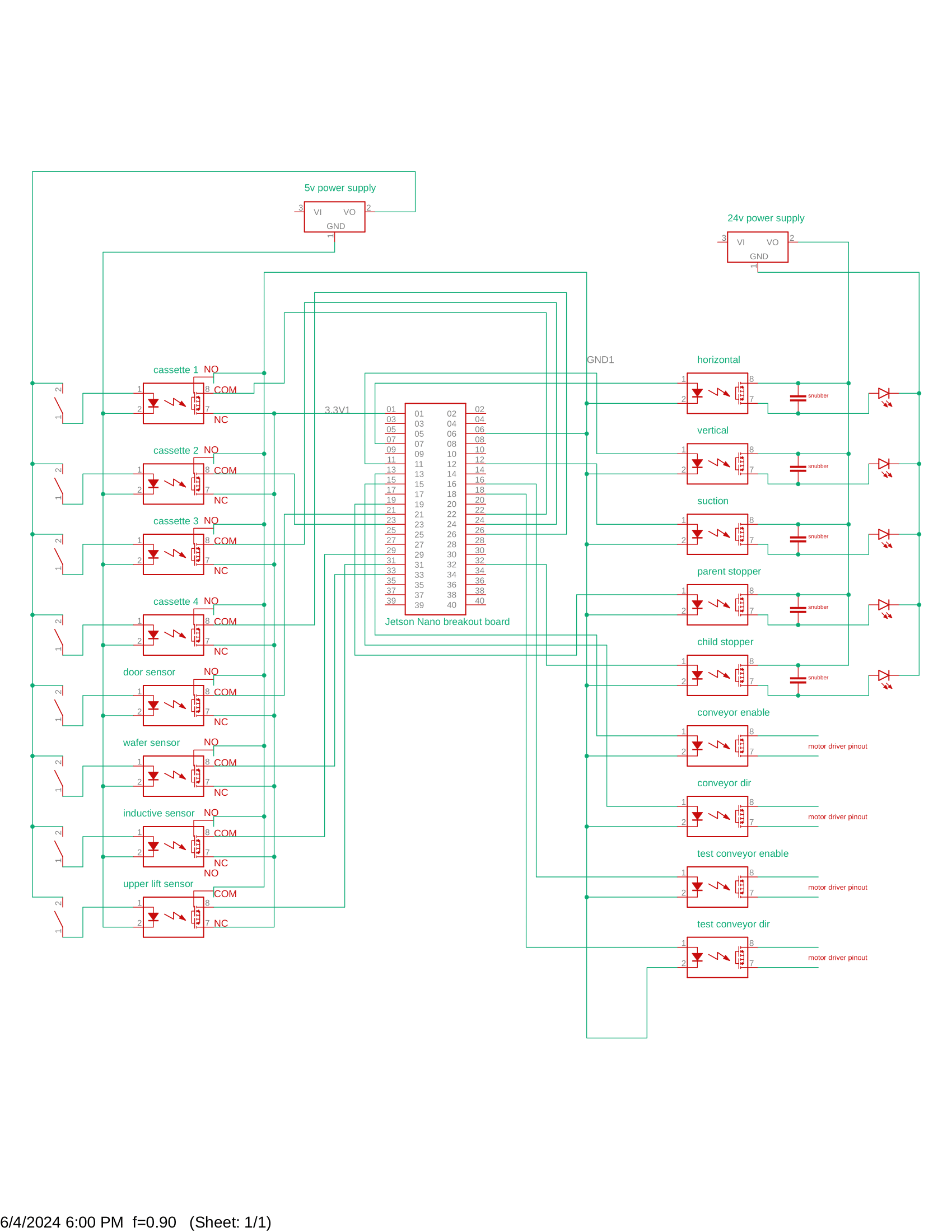
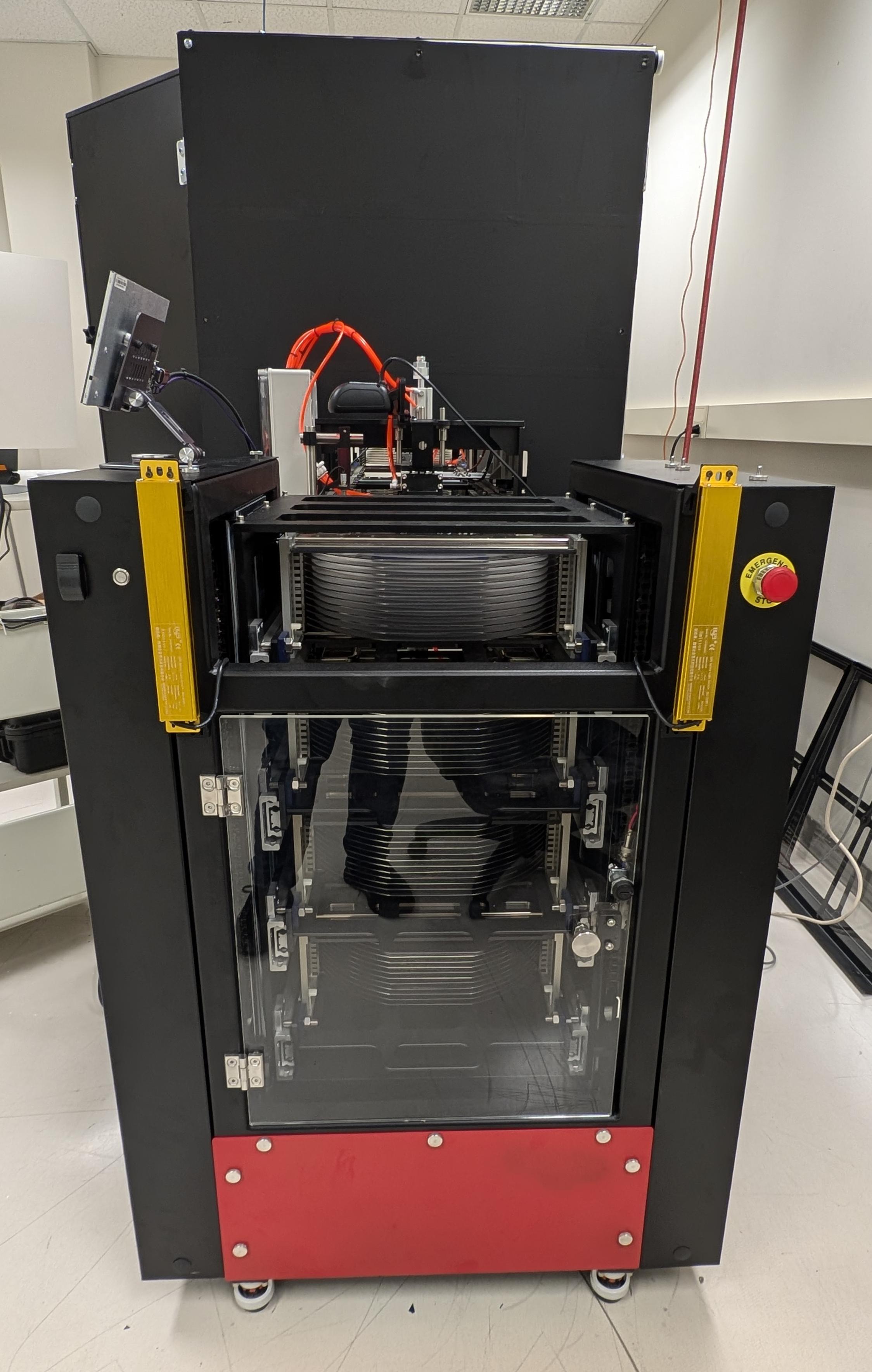
- Designed and implemented the electronic controls circuit, integrating various sensors, motors, and safety features.
- Engineered critical safety features, including an E-stop system and laser curtain, passing TUV electrical inspection standards.
- Implemented an efficient barcode scanning system for wafer tracking and identification.
- Developed a comprehensive logging and diagnostic system using Python's logging module and Tailscale for remote troubleshooting and performance analysis.
MI Windows and Doors Automated Window Assembly Robot
Locks and Latches Distribution System
- Programmed an embedded state machine in C++ on an Arduino Nano to control a complex system of solenoids and sensors, processing over 3,840 locks and latches per day.
- Optimized system performance to achieve cycle times of less than 5 seconds per lock/latch placement operation.
Screw Feeders Distribution System
- Engineered an embedded control system using C++ on Arduino Nano to manage multiple screw feeders, pneumatic solenoids, and reed sensors, processing up to 7,680 screws per day.
- Developed a custom communication protocol between Arduino Nano and Jetson AGX Xavier, featuring asynchronous messaging and real-time state reporting.

 View Gallery
View Gallery